Overview
Canadian Space Agency (CSA), Canada's national space agency was created in 1990 by the Canadian Space Agency Act. Because Canada has 2 languages, their space agency is also known by its French acronym ASC for "agence spatiale canadienne".
Canada has a long history of space activities, being the third nation to launch a satellite. This satellite was named Alouette 1 and launched from Vandenburg Air Force Base in California in September of 1962. Alouette 1 functioned for 10 years, 9 years longer than its mission was planned. The success of this satellite was followed up by others and 1972 the launch of Canadian satellite Anik A-1 made Canada the first country in the world to develope a geostationary communication satellite network.
Another early development of the Canadians was the Black Brant sounding rocket. Its first launch was in September 1959 from the Churchill Rocket Research Range in Manitoba, Canada. This rocket is very popular and many have been launched all over the world. They are still being used to send small, low-cost payloads above the Earth's atmosphere although they cannot reach orbit. They are ideal for scientific research in microgravity, space physics, astronomy, planetary and earth science. In fact, the word "sounding" is derived from the nautical term for measuring the depth of the sea. Investigations using sounding rockets can be assembled quickly if necessary and the small size of the rocket doesn't require the robust structures needed for larger rockets.
Canada has been involved with human space flight for almost 40 years. The country is a pioneer in robotic space exploration and has built the most complex robot systems on the planet for use in space.
You might also enjoy CSA's help for stargazers: Tips and Tricks for Amateur Astronomers
Canadian Space Agency - Robotic Arm
Canada Arm - Remote Manipulator System
Canada's robotic arm was installed on the Space Shuttle Columbia (STS-2) on November 13, 1981, known as Canadaarm-1. This was the beginning of Canada's collaboration with NASA's in human space flight as Canda has continued providing manipulator arms for shuttles and the International Space Station.
Canadarm
Installed on each of the shuttles, one arm was lost on the Challenger Mission STS-51L.
This robotic arm had 6 degrees of freedom similar to a human arm with 2 joints in the shoulder, 1 joint in the elbow (limited to 160 degrees), and 3 joints in the wrist.
Equiped with 2 cameras - one on the wrist and the other on the elbow.
Controlled by astronauts on the Space Shuttle.
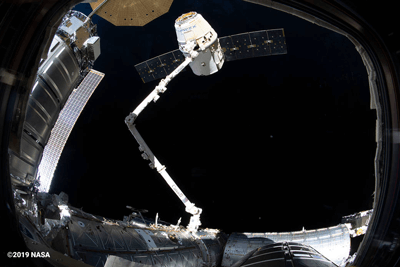
Canadarm2
Permanently in space, fixed on board the International Space Station.
This robotic arm has 7 degrees of freedom, greater than a human arm with 3 joints in the shoulder, 1 joint in the elbow, and 3 joints in the wrist. Joints move 270 degrees in each direction, for a total of 540 degrees of motion.
Each end of Canadarm2 has an identical "hand," known as a Latching End Effector. They allow the arm to grasp objects or latch itself to the Station. It is equiped with 4 cameras.
Controlled from the ground or by astronauts on the International Space Station.
On the ISS Canadarm2 is part of the Space Station Remote Manipulator System (SSRMS) that includes a giant robot - the Special Purpose Dexterous Manipulator (SPDM) called Dextre and Mobile Remote Servicer Base System (MBS) that is located on the station's main truss.
MEET DEXTRE
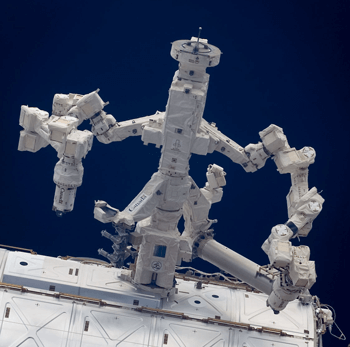
Dextre is the most sophisticated robot ever built. It is also nicknamed the "Canada Hand" because it is a robotic "handyman" that can perform delicate operations not possible with the Canadarm alone. This image shows Dextre attached to its Payload Data and Grapple Fixture on the ISS's "Destiny" laboratory module where it can stay when not in use.
Dextre was launched to the ISS on March 11, 2008 on the space shuttle's STS-123 mission. It took 3 space walks by the shuttle crew to assemble Dextre but various issues kept it from starting work immediately. After the robot was successfully built and could operate correctly, a checkout period meant that Dextre's first job was completed in February 2011.
Dextre's total mass is about 1,662 kg or 3,664 lbs. It is 3.7 m (12 foot) tall and is 2.7 m (11-foot) long including arms. Each arm has 7 joints and but only one can be used while it is executing a task, the other is used for stabilization. It has many tools that can be changed out as needed. It is be used to handle routine maintenance (i.e. changing batteries, examining ISS structures, and working with the solar panels) to free up time for the ISS crew to devote more time to scientific experiments. Special tools have added to supplement Dextre's original equipment so Dextre can be used for refueling missions. Both Dextre and Canadarm2 can use the Mobile Base to glide along the main truss of the ISS on the Mobile Transporter rail allowing access to all parts of the station. Dexter is operated by CSA from Saint-Hubert, Quebec or NASA Johnson Space Center.
Dextre represents a new era for space exploration as it continues to carry out tasks, the technology is being developed. The future outlook is for space robots that are capable of repairing expensive satellites automously.
Dextre's accomplishments
August 2016 - first job with spacewalking humans
May 2014 - first robot to repair itself in space
January 2013 – first test of robot refueling a satellite
Canadarm3
An artificial intelligence-based robotic system under development for the Lunar Gateway, to remain in orbit around the moon.
- - Find out more on CSA's website at: Canada Arm
Canada's Human Space Flight Program
About the job - CSA Astronaut
Find out how a Canadian goes through the 3 steps of astronaut on-the-job-training. This in depth study is much the same for all astronauts!
- Astronauts' basic training
- Ongoing training and tasks (while waiting for a mission)
- Mission-specific training
Julie Payette - first Canadian on ISS (biography)
Participation in the International Space Station (ISS)
This photo gallery tells the story of the Canadian journey into human space flight:
20 years of continuous human presence on the International Space Station
This activity for students in grades 3 - 6 was developed by CSA
Mission: Astronaut - Discover what living and working on the International Space Station for Canadianteachers and students
Canadarm2 assists Cargo Dragon from the station on its return to Earth on its 17th mission to ISS